우리는 길을 걸으면서 수많은 장애물을 피해 걸어야 안전하게 목적지에 도착할 수 있습니다.길 한가운데 서 있는 우리는 어떻게 목적지까지 장애물을 피해갈 수 있을까요?어떤게 필요한지 생각해보셨나요?너무 익숙해져 당연하기 때문에 그 존재의 가치를 잊고 있기도 합니다.이렇게 새로운 물건을 만들어낼 때, 특히 사람과 비슷하게 행동하고 결과를 내야 하는 인공지능을 만들어낼 때 ‘일반적으로 사람은 어떻게 행동하는가?’라고 생각할 수 있게 됩니다.오늘은 길, 장애물, 목적지와 관련된 인공지능에 대해 이야기하고자 합니다.어떤 인공지능인지 짐작이 가시나요? 그럼 지금부터 그 이야기를 시작해 볼까요? 누구나 베스트 드라이버가 될 수 있을까.

제목에서 알게, 이번 이야기는 자동 운전에 대한 이야기입니다. 많은 사람이 기다리고 있는 인공 지능의 한 분야라고 말할 수 있습니다. 현대 자동차에 의하면, 자동 운전은 “운전자가 직접 조작하지 않고도 차량 외부 환경 및 운전자의 상태를 인지하고 인지한 정보를 토대로 판단한 뒤 차량을 제어하고 스스로 목적지까지 주행할 수 있도록 돕는 기술”이라고 합니다.또한 자동 운전 기술은 일반적으로 자동차 업체에서만 관심을 갖고 있다고 생각되지만 그렇지 않다는 점도 당부하셨어요. “자동 운전 기술은 전통적인 자동차 업체뿐 아니라 세계 유수의 IT기업까지 적극적으로 개발에 참여할 만큼 미래 모빌리티 기술의 핵심으로 여겨지는 “라고 합니다.사람들이 자동 운전을 손꼽아 기다리는 이유는 운전자의 부주의로 인한 사고를 줄일 수 있다는 점입니다. 사회적으로 이 필요성에 대해서는 목소리가 높습니다. 부주의로 인한 사고를 막고 자동차와 관련한 교통 사고, 범죄 사고도 줄일 수 있을 뿐더러 운전이 어려운 분들에게도 기회가 제공되기 때문입니다. 물론 염려되는 부분도 양날의 칼처럼 당연히 존재할 수밖에 없습니다. 그래도 이런 전반적인 긍정적인 부분 때문에 자동 운전에 대한 기대감이 높고 빨리 상용화되면 좋겠다는 소망을 큰 것 같아요. 자동 운전에도 단계가 있다! Step by Step!

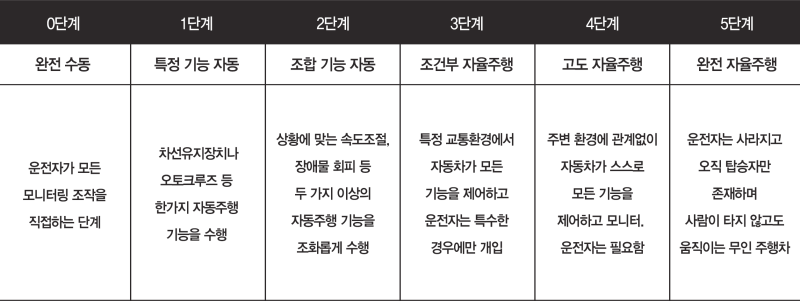
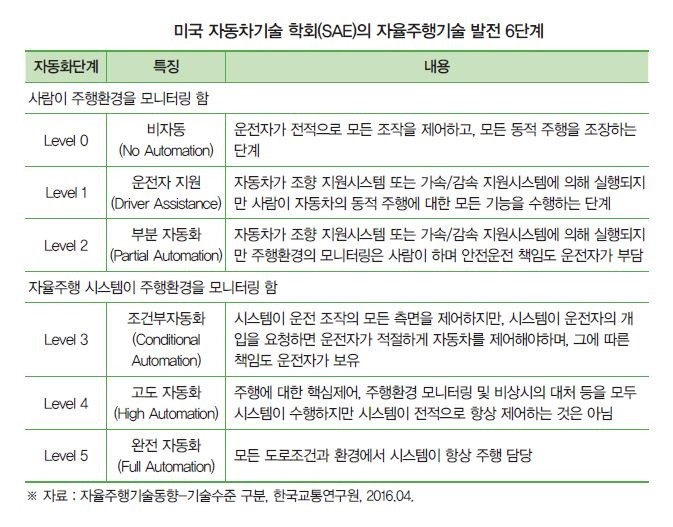
최근 출시되는 신규 모델에는 완벽한 자율주행은 아니지만 주행을 보조하는 방식으로 운전자의 편의를 돕고 있습니다. 국제자동차기술협회(SAE International)는 2016년 자율주행 기술 단계를 0단계부터 5단계까지 총 6단계로 나눴습니다.

수준 0비 자동 운전자가 차량 운전 및 속도 제어를 모두 담당해야 할 단계에서 자동 운전 기술이 없는 단계다.수준 1드라이버 보조 자동 운전 기술이 조금씩 쓰는 단계에서 운전자가 핸들에 손을 대고 있는 것을 전제로 자동 운전 시스템이 특정 주행 모드에서 스티어링 또는 감소·가속 중 어느 하나를 실시한다. 수준 2부분의 자동화보다 완전한 자동 운전 자동차에 접근 단계에서 운전자가 개입하지 않아도 시스템이 자동차의 속도와 방향을 동시에 제어한다.레벨 3조건부 자동화 이 때부터는 운전자의 개입이 더 줄어들 돌발 상황이 발생하고 자동 운전 모드 해제가 예상되는 경우에만 시스템이 운전자의 운전을 요청한다.레벨 4고도 자동화 수준 4는 레벨 3과 마찬가지로 시스템이 전체 주행을 하지만 위험 상황이 발생했을 때도 시스템이 안전하게 대응해야 한다. 시스템은 운행 구간 전체를 모니터링하고 안전 관련 기능을 스스로 제어한다. 레벨 5완전 자동화 운전자가 필요 없는 무인 자동차 단계에서 탑승자가 목적지를 말하면 사람의 개입 없이 시스템이 판단하고 스스로 운전하게 된다. 이 단계에서는 운전석과 엑셀, 브레이크, 스티어링 휠 등의 조작 장치가 필요 없어진다.
출처 : [네이버 지식백과] 자율주행단계 (시사상식사전, pmg 지식엔진연구소)

출처 : 현대차 홈페이지/럭셔리 자동차 새 기준, 〈모터트렌드〉2023 올해의 차 제네시스 G90

현대차에서 출시 예정인 ‘G90’의 연식변경 모델이 전 세계에서 3단계 탑재됐고 출신하는 몇 안 되는 차량이라는 점에서 현재 3단계 조건부 자동화 정도까지 도달했다고 볼 수 있을 것 같습니다. 국내에서는 첫 레벨3 자율주행차인데요. 이 단계는 비상시에만 운전자가 개입하는 단계로 운전자가 운전대를 잡지 않아도 운전이 가능한 수준이거든요. 이 차량에 탑재되는 3단계 자율주행 기술 중 하나가 ‘고속도로 파일럿(HDP)’으로 곡선주행, 차선변경, 고속도로 진입도 스스로 할 수 있는 기술이라고 합니다. 그래서 자율주행은 어떻게 만들어지는 거야?

이제 본격적으로 자동 운전에 필요한 요소를 고려하려고 합니다. 아까 이야기한 것처럼 도로에서 목적지에 가는 것을 생각하면 생각보다 어떻게 만들어지는지 이해하기 쉽습니다. 우선, 우리가 나아갈 길에 우선 장애물이 있는지, 어느 길로 나아가야 하는지 등을 파악하는 주변 환경에 관한 정보를 파악할 필요가 있습니다. 파악해야 하는 이유는 내리막에서는 다치지 않도록 감속해야 하며 오르막에서는 힘차게 나아가기 때문에 가속해야 하니까요. 또 고속 도로의 골목이 있으면 진입하기 위해서 도중에 방향을 바꾸기도 합니다. 장애물에 마주 보았을 때는 피할꼬, 점프해서 가야 할지 등, 가기에서 변수를 고려하고 전략을 짜야 하니까요. 이렇게 생각한 전략을 바탕으로 우리는 걸어서 목적지로 향하게 됩니다. 여러가지 생각한 경우의 수의 전략을 바탕으로 마주 보는 상황에 따라서 가속이나 감속, 방향 전환 등을 하게 됩니다.
이를 자동 운전에서 가져옵니다. 자동 운전 시스템은 3단계를 거치는데요. 우리가 나아갈 길에 장애물이 있는지, 어느 길로 나아가야 하는지 등을 파악하는 주변 환경에 관한 정보를 파악하기를 “주행 환경 인식”이라고 합니다. 그리고 목적지까지 가기 위해서 수집된 정보를 바탕으로 전략을 세워야 할 단계도 거칩니다. 이 단계를 “판단/주행 전략”단계로 칭하고 있습니다. 돌발 상황에 대해서도 어떻게 진행할지 전략을 세우고 주행 속도와 경로도 기록합니다. 그리고 다음 단계는[차량 제어]상황에 따른 가속, 감속, 급제동을 걸어 목적지에 도달합니다. 운전자에게 경고나 정보를 제공하고, 또한 주행하고 있는 주변 차량과의 정보 교환을 갖고 무사히 목적지까지 가기 위한 다양한 제어를 실시합니다.이처럼 우리가 목적지에 무사히 도달하기 위해서 많은 신경을 곤두세우고 주변도 잘 보면서 정보를 찾듯 자동 운전도 마찬가지입니다. 특히 차량이 지나는 도로의 경우는 여러 다른 차량과 함께 주행하거나 다양한 변수가 많기 때문에 사고를 일으키지 않으려면[주행 환경 인식]이 매우 중요합니다. 장애물은 아닌지 부딪힐 만한 사람은 지나가지 않는지 눈으로 보고, 또 옆에서 사람이 다니는지, 어디에서 무엇이 발행됐는지, 귀은 정보를 정보를 토대로 전략을 바꾸면서 길을 가도록, 차도 이런 부분이 꼭 필요합니다.차량은 사람의 눈, 귀 등의 감각 기관이 없기 때문에 다양한 센서를 달아 다양한 정보를 수집하게 됩니다. 이런 센서 기술도 현재 매우 다양하게 등장했으며 CES2022에도 소개됐대요.이처럼 사람의 경험에 빗대어 보면 인공 지능이 만들어지는 원리를 이해하는데 큰 어려움은 없다고 생각합니다. 자동 운전도 인공 지능 기술이며 사람처럼 스스로 사고하고 길을 찾아가는 기술인 만큼 사람의 생각과 비슷하게 흐르고 있는 것 같습니다. 단지 감각 기관이 없어서 이런 부분을 갖가지 방법을 동원하고 충족시켜야 한다는 점이 있군요!(. ∀`)
이걸 자율주행으로 가져올게요. 자율주행 시스템은 3단계를 거치는데요. 우리가 가야 할 길에 장애물이 있는지, 어느 길로 가야 하는지 등을 파악하는 주변 환경에 대한 정보를 파악하는 것을 ‘주행 환경 인식’이라고 합니다. 그리고 목적지까지 가기 위해 수집된 정보를 바탕으로 전략을 세우는 단계도 거칩니다. 이 단계를 ‘판단/주행 전략’ 단계라고 칭하고 있습니다. 돌발상황에 대해서도 어떻게 진행할지 전략을 세우고 주행속도와 경로도 기록합니다. 그리고 다음 단계는 [차량 제어] 상황에 따라 가속, 감속, 급제동을 걸어 목적지에 도달합니다. 운전자에게 경고나 정보를 제공하고, 또 주행하고 있는 주변 차량과 정보를 교환해 무사히 목적지까지 가기 위한 다양한 제어를 합니다.이처럼 우리가 목적지에 무사히 도달하기 위해 많은 신경을 곤두세우고 주위도 살펴보면서 정보를 찾듯이 자율주행도 마찬가지라고 할 수 있습니다. 특히 차량이 다니는 도로의 경우에는 여러 다른 차량과 함께 주행하거나 여러 변수가 많기 때문에 사고를 내지 않기 위해서는 [주행 환경 인식]이 매우 중요합니다. 장애물은 없는지, 부딪힐 것 같은 사람은 지나가지 않는지 눈으로 보고 또 옆에서 사람이 지나가는지, 어디서 무엇이 발행됐는지 귀는 정보를 정보에 근거해서 전략을 바꾸면서 길을 가는 것처럼 차도 이런 부분이 꼭 필요합니다.차량은 사람의 눈, 귀 등 감각기관이 없기 때문에 다양한 센서를 부착하여 다양한 정보를 수집하게 됩니다. 이러한 센서 기술도 현재 매우 다양하게 등장하고 있으며 CES 2022에도 소개되었다고 합니다.이렇게 사람의 경험에 빗대어 생각해 보면 인공지능이 만들어지는 원리를 이해하는 데 큰 어려움이 없을 것 같습니다. 자율주행도 인공지능 기술이고, 사람처럼 스스로 사고하고 길을 찾아가는 기술인 만큼 사람의 사고방식과 비슷하게 흘러가는 것 같습니다. 다만 감각기관이 없기 때문에 이런 부분들을 다양한 방법을 동원해서 채워야 한다는 점이 있네요!(.∀`)

오늘은 여기까지!。 자동 운전에 대해서 쉽게 알아봤습니다.자동 운전에 단계가 있었다고는 몰랐던 것이 많다고 생각합니다.또 현재 어느 정도의 기술력까지 왔는지 모르는 것이 많다고 생각합니다.오늘은 제1차로 간단한 내용을 해명했습니다.다음의 제2탄으로 눈과 귀에 되어 주는 센서에 대해서 이야기 하고 싶다고 생각합니다!AI교육 플랫폼 AI EDUTOM의 블로그에서는 단순히 AI EDUTOM에 대한 이야기만 아니라 이처럼 다양한 인공 지능의 소식도 전합니다.인공 지능에 관한 교육 자료로 활용 가능하므로 많은 관심을 가지세요!그럼 우리는 다음에서 만납시다!(o’v’)오늘은 여기까지!。 자율주행에 대해 간단히 알아봤습니다.자율주행에 단계가 있었는지 모르시는 분들이 많을 거예요.또 현재 어느 정도 기술력까지 왔는지 모르신 분들이 많을 거예요.오늘은 1편에서 간단한 내용을 설명해드렸습니다.다음 2탄에서 눈과 귀가 되어줄 센서에 대해 깊이 이야기하고 싶습니다!AI 교육 플랫폼 AI EDUTOM 블로그에서는 단순히 AI EDUTOM에 대한 이야기뿐만 아니라 이처럼 다양한 인공지능 소식도 전해드립니다.인공지능에 대한 교육자료로 활용할 수 있으니 많은 관심 부탁드립니다!그럼, 우리는 다음에 만나요!(opv)