▲연구팀이 최적화 프레임워크를 자율로봇에 적용해 테스트하고 있다.(사진=MIT)
MIT 연구진이 자동 로봇 시스템 개발 시 자동 레시피처럼 활용할 수 있는 범용 설계 도구를 개발했다고 MIT뉴스가 최근 보도했다.
이 범용 설계 도구를 위해 연구진은 자율로봇 시스템 개발 시 시뮬레이션 과정에 적용해 개발 효율성을 높이는 최적화 코드를 고안했다. 이 코드는 로봇의 성능을 높이기 위해 시스템을 어떻게, 그리고 어디에서 조정해야 하는지를 식별할 수 있게 해준다.
연구진에 따르면 최근 자율주행 자동차, 라스트마일 로봇 배송, 물류창고 로봇 포장 작업 등 자동으로 로봇에 인공지능 시스템이 광범위하게 채택되고 있다. 하지만 이들 각각의 로봇 시스템은 특정 시스템에 특화된 임시 설계 프로세스의 산물이다. 자율로봇 시스템 설계 시 로봇 개발자들은 시뮬레이션 과정에서 수많은 시행착오를 겪는다. 이러한 시뮬레이션을 통해 특정 로봇의 구성요소와 성능을 작업에 맞게 조정하는 것이다. 이런 일련의 과정은 마치 레시피 없이 빵을 굽는 것과 같다.
MIT 연구진이 개발한 새로운 범용 최적화 솔루션은 보행 로봇, 자율주행 자동차, 여러 협동 로봇 등 광범위한 자율 시스템 개발을 가속화할 수 있다.
연구팀은 기존 자율시스템에 적용 가능한 최적화 프레임워크, 즉 컴퓨터 코드를 개발했다. 코드의 핵심은 기계학습 커뮤니티 내에서 개발돼 초기에 신경망을 훈련시키는 데 사용된 프로그래밍 도구인 자동차별화(automatic differentiation), 즉 ‘오토디프(autodiff)’에 기반을 두고 있다. 오토딥은 컴퓨터 프로그램 매개 변수 변경에 대한 민감도를 신속하고 효율적으로 평가할 수 있는 기술이다.
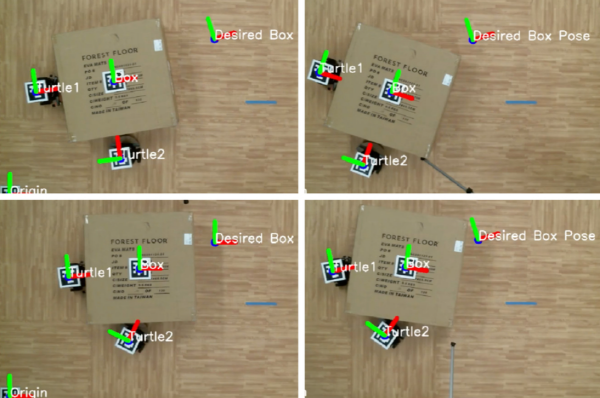
연구팀은 이번에 개발한 최적화 도구를 두 개의 매우 다른 자율 로봇 시스템에 적용해 로봇의 성능을 빠르게 향상시킬 수 있음을 보여줬다. 하나는 로봇이 두 장애물 사이의 경로를 탐색하는 것이고, 다른 하나는 로봇 한 쌍이 함께 작업해 무거운 상자를 옮기는 것이다.
장길수 [email protected] <저작권자© 로봇신문사 무단전재 및 재배포 금지>