비행기나 배는 보이지 않는 항로를 따라 운행합니다. 인공위성도 보이지 않는 궤도를 따라 지구 주위를 돈다. 목적지를 찾는 비행기와 배는 물론 궤도를 선회하는 위성은 임무 수행을 위해 정확한 자세가 중요합니다. 특히 고도 수백㎞ 또는 수만㎞ 상공에서 지구를 관측하고 지상과 신호를 주고받아야 하는 위성은 자세 제어가 임무의 성패를 좌우합니다. 위성의 자세가 한 번만 어긋나도 지상에서는 수십수백 kg의 오차가 생기기 때문입니다.
지상에서 빠른 시간 내에 수시로 위성을 정밀 제어하는 데는 한계가 있습니다. 그래서 위성은 스스로 센서의 측정치를 이용하여 정확한 임무 수행에 필요한 자세를 수정하고 바로잡습니다. 자동제어를 통해 실시간으로 이루어지는 것입니다. 위성이 자신의 자세를 확인하는 방법을 간단하게 살펴보겠습니다.
인공위성은 태양, 지구, 별 등을 이용해 자세를 제어한다.태양, 지구를 통해 위성위치·자세파악 인공위성의 자세제어를 위해서는 추력기와 관성바퀴를 주로 이용하는데요. 관성 바퀴는 회전하는 물체의 속도를 가속하거나 감속하기 위해 회전축에 부착한 바퀴입니다. 전기 모터로 작동하는 만큼 연료를 소모하지 않고 센서의 제어 명령에 따라 위성의 자세를 빠르고 정확하게 바꿀 수 있습니다. 위성은 이러한 자세 제어를 위해서 태양(태양 센서)이나 지구(지구 센서), 별(별 추적기)을 이용합니다.
먼저 태양 센서는 태양광을 감지하여 빛의 입사각에 비례하는 전류를 발생시켜 태양의 위치 정보를 제공합니다. 태양센서에 장착된 기하학적 정보와 태양각을 이용하여 자세를 간접적으로 인식하는 방식입니다. 태양 센서는 가장 널리 사용하는 센서 중 하나로 거의 모든 위성에는 1~2개의 태양 센서를 탑재하고 있습니다. 지구 센서는 수평선(지평선, Horizon)에서 발생하는 지구 적외선의 변화를 감지하여 자세를 결정합니다. 지구 궤도를 회전하는 위성의 입장에서 보면 지구는 태양 다음으로 밝은 천체랍니다.
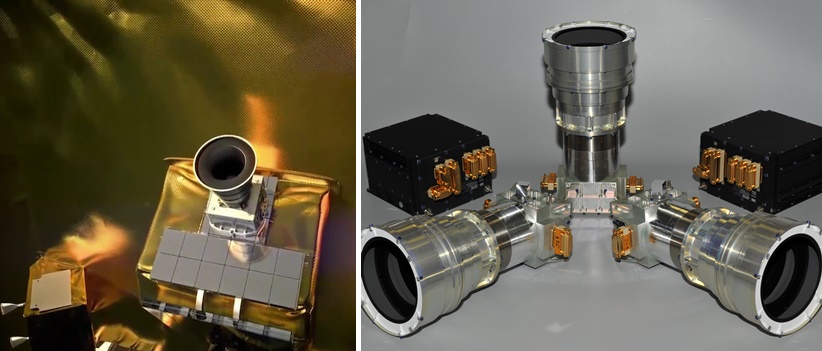
별 추적기는 별을 인식해 위성 자세 정보를 제공하는 센서. 사진은 ESA에서 개발한 별 추적기.고기동·고정밀 위성의 주요 센서 ‘별추적기’ 별추적기(Star Tracker)는 우주의 별을 촬영하고 인식하여 위성의 자세정보를 제공하는 센서입니다. 우수한 자세 성능을 제공하기 위해 고기동, 고정밀 위성의 주요 센서로 사용되고 있습니다. 국내에서도 다목적 실용위성 아리랑 2호부터 별추적기를 탑재하고 있습니다.
별 추적기 내부에는 2,000개에 가까운 별 카탈로그가 입력되어 있으며 -2등급부터 5등급까지 별의 밝기 정보와 위치가 기록되어 있습니다. 별 추적기는 카탈로그에 없는 별까지 촬영합니다. 카탈로그에 기록된 등급 이외의 별과 너무 가까운 별은 목록에서 제외됩니다. 이러한 과정을 거쳐 나머지 20개의 별 식별 과정을 거쳐 측정한 별 정보와 카탈로그 상의 별 정보로부터 위성의 방위를 나타내는 자세를 계산하게 됩니다.
인공위성은 이처럼 태양, 지구, 별을 이용한 자세센서와 함께 관성센서인 자이로(Gyroscope)를 통해 정밀한 자세운동을 하게 됩니다. 우주로 나는 물체는 우주 공간에서 중심을 잡고 정확한 자세로 비행하는 것이 가장 중요합니다. 자이로는 회전을 감지하는 센서로 가속도 센서와 함께 사용되며 위성의 속도, 모서리 속도, 방향, 거리 등 다양한 항법 정보를 제공하게 됩니다.
기획/제작 : 항공우주 Editor 오요한 자문 / 감수 : 정지궤도복합위성사업단 용기박사